LEGO® MINDSTORMS® Κινητήρες και αισθητήρες EV3.
Κινητήρες
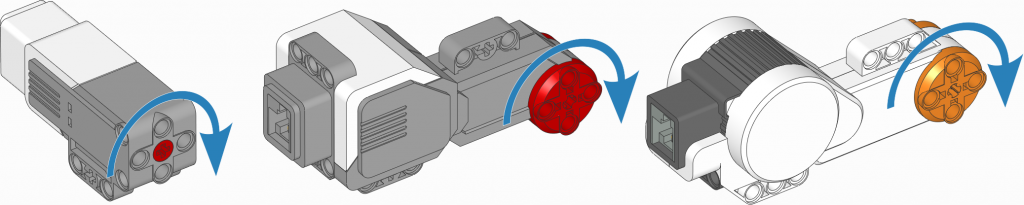
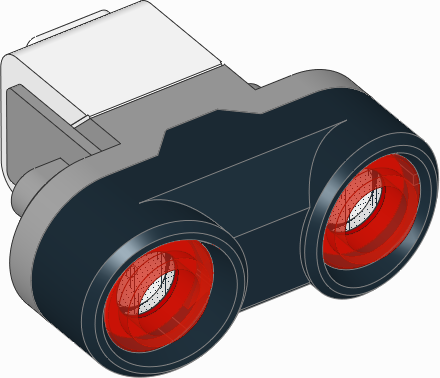
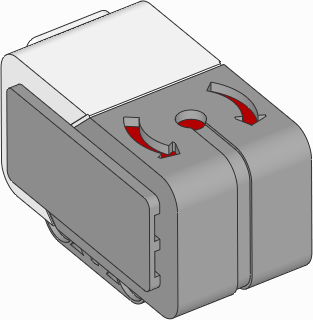
Εικόνα 17 Κινητήρες συμβατοί με EV3. Τα βέλη υποδεικνύουν την προεπιλεγμένη θετική κατεύθυνση.
class. Motor(port, positive_direction=Direction.CLOCKWISE, gears=None)Γενική κλάση για τον έλεγχο κινητήρων με ενσωματωμένους αισθητήρες περιστροφής.
| Παραμέτροι: | port (Port) – Θύρα στην οποία είναι συνδεδεμένος ο κινητήρας. positive_direction (Κατεύθυνση) – Προς ποια κατεύθυνση πρέπει να κατευθύνεται ο κινητήρας γυρίστε όταν δώσετε μια θετική τιμή ταχύτητας ή γωνία. γρανάζια (κατάλογος) –Κατάλογος γραναζιών που συνδέονται με τον κινητήρα. Για παράδειγμα: το [12, 36] αντιπροσωπεύει μια συστοιχία γραναζιών με ένα γρανάζι 12-δοντιών και ένα γρανάζι 36 δοντιών. Χρήση μίας λίστας με ζεύγη για πολλές συστιχίες γραναζιών, όπως [[12, 36], [20, 16, 40]].Όταν καθορίζετε ένα γρανάζι, όλες οι εντολές και οι ρυθμίσεις του κινητήρα προσαρμόζονται αυτόματα για να λάβουν υπόψη το γρανάζι που προκύπτει απο την αναλογία. Η κατεύθυνση του κινητήρα παραμένει αμετάβλητη από αυτό. |
|---|
Μέτρηση
Παίρνει την ταχύτητα του κινητήρα.
| Επιστρέφει: | Ταχύτητα κινητήρα. |
|---|---|
| Τύπος επιστροφής: | rotational speed: μοίρες/δευτ |
Παίρνει τη γωνία περιστροφής του κινητήρα.
| Επιστρέφει: | Γωνία κινητήρα. |
|---|---|
| Τύπος επιστροφής: | angle: μοίρες |
Ρυθμίζει τη συσσωρευμένη γωνία περιστροφής του κινητήρα σε μια επιθυμητή τιμή.
| Παραμέτρους: | angle (angle: μοίρες) – Τιμή στην οποία πρέπει να γίνει επαναφορά της γωνίας. |
|---|
Σταματώντας
stop()
Σταματά τον κινητήρα και τον αφήνει να περιστρέφεται ελεύθερα.
Ο κινητήρας σταματά σταδιακά λόγω τριβής.
Φρενάρει παθητικά τον κινητήρα.
Ο κινητήρας σταματά λόγω τριβής, συν την τάση που δημιουργείται ενώ ο κινητήρας εξακολουθεί να κινείται.
Σταματά τον κινητήρα και τον κρατά ενεργά στην τρέχουσα γωνία του.
Ενέργειες
Εκκινεί τον κινητήρα με σταθερή ταχύτητα.
Ο κινητήρας επιταχύνει στη δεδομένη ταχύτητα και συνεχίζει να λειτουργεί σε αυτό ταχύτητα μέχρι να δώσετε μια νέα εντολή.
| Παραμέτρους: | ταχύτητα (rotational speed: deg/s) – Ταχύτητα του κινητήρα. |
|---|
run_time(speed, time, then=Stop.HOLD, wait=True)
Εκκινεί τον κινητήρα με σταθερή ταχύτητα για ένα δεδομένο χρονικό διάστημα.
Ο κινητήρας επιταχύνει στη δεδομένη ταχύτητα, συνεχίζει να λειτουργεί με αυτή την ταχύτητα, και στη συνέχεια επιβραδύνεται. Ο συνολικός ελιγμός διαρκεί ακριβώς για τη δεδομένη τιμή time.
| Παράμετροι: | speed (rotational speed: deg/s) – Ταχύτητα του κινητήρα. time (time: ms) – Γωνία στην οποία ο κινητήρας πρέπει να περιστραφεί.. then (Stop) – Τι να κάνει αφού ακινητοποιηθεί. wait (bool) – Περιμένετε να ολοκληρωθεί ο ελιγμός πριν συνεχίσετε με το υπόλοιπο πρόγραμμα. |
|---|
run_angle(speed, rotation_angle, then=Stop.HOLD, wait=True)
Τρέχει τον κινητήρα με σταθερή ταχύτητα από μια δεδομένη γωνία.
| Παράμετροι: | speed (rotational speed: deg/s) – Ταχύτητα του κινητήρα. target_angle (angle: deg) – Γωνία στην οποία ο κινητήρας πρέπει να περιστραφεί. then (Stop) – Τι να κάνει αφού ακινητοποιηθεί. περιμένετε (bool) – Περιμένετε να ολοκληρωθεί ο ελιγμός πριν συνεχίσετε με το υπόλοιπο πρόγραμμα. |
|---|
run_target(ταχύτητα, target_angle, τότε=Stop.HOLD, wait=Αλήθεια)
Τρέχει τον κινητήρα με σταθερή ταχύτητα προς ένα δεδομένης της γωνίας στόχου.
Η κατεύθυνση περιστροφής επιλέγεται αυτόματα με βάση το στόχο γωνία. Έχει σημασία αν είναι θετική ή αρνητική.speed
| Παραμέτρους: | ταχύτητα (ταχύτητα περιστροφής: deg / s) – Ταχύτητα του κινητήρα.target_angle (γωνία: deg) – Γωνία που πρέπει να έχει ο κινητήρας περιστροφή σε.τότε (Stop) – Τι να κάνετε αφού ακινητοποιηθείτε.περιμένετε (bool) – Περιμένετε να φτάσει ο κινητήρας στο στόχο πριν συνεχίσετε με τα υπόλοιπα πρόγραμμα. |
|---|
run_until_stalled(ταχύτητα, τότε=Stop.COAST, duty_limit=Καμία)
Τρέχει τον κινητήρα με σταθερή ταχύτητα μέχρι να σταματήσει.
| Παραμέτρους: | ταχύτητα (ταχύτητα περιστροφής: deg / s) – Ταχύτητα του κινητήρα.τότε (Stop) – Τι να κάνετε αφού ακινητοποιηθείτε.duty_limit (ποσοστό: %) – Όριο ροπής κατά τη διάρκεια αυτής της περιόδου εντολή. Αυτό είναι χρήσιμο για να αποφύγετε την εφαρμογή ολόκληρου του κινητήρα ροπή σε μηχανισμό με γρανάζια ή μοχλό. |
|---|---|
| Επιστρέφει: | Γωνία κατά την οποία ο κινητήρας σταματά. |
| Τύπος επιστροφής: | γωνία: βαθμοί |
Περιστρέφει τον κινητήρα σε έναν δεδομένο κύκλο λειτουργίας (γνωστός και ως “ισχύς”).
Αυτή η μέθοδος σάς επιτρέπει να χρησιμοποιείτε έναν κινητήρα ακριβώς όπως ένας απλός κινητήρας συνεχούς ρεύματος.
| Παραμέτρους: | δασμός (ποσοστό: %) – Ο κύκλος λειτουργίας (-100,0 έως 100). |
|---|
Προηγμένος έλεγχος κίνησηςtrack_target(target_angle)
Παρακολουθεί μια γωνία στόχου. Αυτό είναι παρόμοιο με το run_target(), αλλά η συνήθης ομαλή επιτάχυνση παραλείπεται: θα μετακινηθεί στο στόχο γωνία όσο το δυνατόν γρηγορότερα. Αυτή η μέθοδος είναι χρήσιμη εάν θέλετε να αλλάξτε συνεχώς τη γωνία στόχου.
| Παραμέτρους: | target_angle (γωνία: βαθμοί) – Γωνία στόχου που πρέπει να έχει ο κινητήρας περιστροφή σε. |
|---|
Οι κινητήρες χρησιμοποιούν έλεγχο PID για να παρακολουθούν με ακρίβεια την ταχύτητα και γωνιακοί στόχοι που καθορίζετε. Μπορείτε να αλλάξετε τη συμπεριφορά του μέσω του χαρακτηριστικού του κινητήρα. Ανατρέξτε στην ενότητα Η κλάση ελέγχου για μια επισκόπηση των διαθέσιμων μεθόδων.control
Αισθητήρας αφής
.class TouchSensor(port)
LEGO® MINDSTORMS® Αισθητήρας αφής EV3.
| Παραμέτρους: | port (Port) – Θύρα στην οποία είναι συνδεδεμένος ο αισθητήρας. |
|---|
Ελέγχει εάν ο αισθητήρας είναι πατημένος.
| Επιστρέφει: | True εάν ο αισθητήρας πιέζεται, False εάν είναι δεν πιέζεται. |
|---|---|
| Τύπος επιστροφής: | δυαδικό |
Αισθητήρας χρώματος
.class ColorSensor(port)
LEGO® MINDSTORMS® Αισθητήρας χρώματος EV3.
| Παραμέτρους: | port (Port) – Θύρα στην οποία είναι συνδεδεμένος ο αισθητήρας. |
|---|
Μετρά το χρώμα μιας επιφάνειας.
| Επιστρέφει: | Color.BLACK ή Color.BLUE ή color.GREEN ή Color.YELLOW ή Color.RED ή Color.WHITE ή Color.BROWN ή None |
|---|---|
| Τύπος επιστροφής: | Χρώμα, ή None αν δεν έχει εντοπιστεί χρώμα. |
Μετρά την ένταση του φωτισμού περιβάλλοντος.
| Επιστρέφει: | Ένταση φωτισμού περιβάλλοντος, που κυμαίνεται από 0 (σκούρο) έως 100 (φωτεινό). |
|---|---|
| Τύπος επιστροφής: | ποσοστό: % |
Μετρά την αντανάκλαση μιας επιφάνειας χρησιμοποιώντας ένα κόκκινο φως.
| Επιστρέφει: | Αντανάκλαση, που κυμαίνεται από 0 (χωρίς αντανάκλαση) έως 100 (υψηλή αντανάκλαση). |
|---|---|
| Τύπος επιστροφής: | ποσοστό: % |
Μετρά την αντανάκλαση μιας επιφάνειας χρησιμοποιώντας ένα κόκκινο, πράσινο και στη συνέχεια ένα μπλε φως.
| Επιστρέφει: | Πλειάδα αντανακλάσεων για κόκκινο, πράσινο και μπλε φως, το καθένα που κυμαίνονται από 0,0 (χωρίς αντανάκλαση) έως 100,0 (υψηλή αντανάκλαση). |
|---|---|
| Τύπος επιστροφής: | (ποσοστό: %, ποσοστό: %, ποσοστό: %) |
Υπέρυθρος Αισθητήρας και Δέσμη
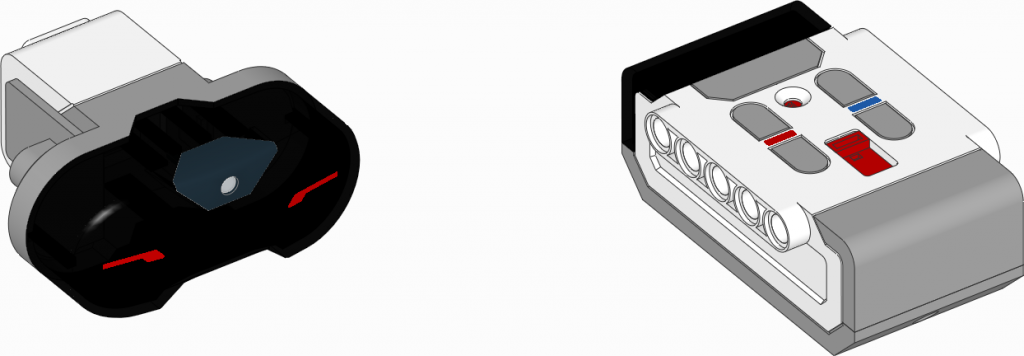
LEGO® MINDSTORMS® EV3 Αισθητήρας υπερύθρων και φάρος.
| Παραμέτρους: | λιμάνι (Λιμάνι) – Θύρα στην οποία είναι συνδεδεμένος ο αισθητήρας. |
|---|
Μετρά τη σχετική απόσταση μεταξύ του αισθητήρα και ενός αντικειμένου χρησιμοποιώντας υπέρυθρο φως.
| Επιστρέφει: | Σχετική απόσταση που κυμαίνεται από 0 (πλησιέστερη) έως 100 (μακρύτερα). |
|---|---|
| Τύπος επιστροφής: | σχετική απόσταση: % |
Μετρά τη σχετική απόσταση και γωνία μεταξύ του τηλεχειριστηρίου και του υπέρυθρος αισθητήρας.
| Παραμέτρους: | κανάλι (ίντ) – Αριθμός καναλιού του τηλεχειριστηρίου. |
|---|---|
| Επιστρέφει: | Πλειάδα σχετικής απόστασης (0 έως 100) και γωνίας κατά προσέγγιση (-75 έως 75 μοίρες) μεταξύ απομακρυσμένου και υπέρυθρου αισθητήρα. |
| Τύπος επιστροφής: | (σχετική απόσταση: %, γωνία: deg) ή (, ) εάν δεν εντοπιστεί τηλεχειριστήριο.NoneNone |
Ελέγχει ποια κουμπιά στο τηλεχειριστήριο υπερύθρων πατιούνται.
Αυτή η μέθοδος μπορεί να ανιχνεύσει έως και δύο κουμπιά ταυτόχρονα. Αν πατήσετε περισσότερα κουμπιά, ενδέχεται να μην λάβετε χρήσιμα δεδομένα.
| Παραμέτρους: | κανάλι (ίντ) – Αριθμός καναλιού του τηλεχειριστηρίου. |
|---|---|
| Επιστρέφει: | Λίστα πατημένων κουμπιών στο τηλεχειριστήριο στο επιλεγμένο κανάλι. |
| Τύπος επιστροφής: | Λίστα κουμπιών |
Ελέγχει ποια κουμπιά στο τηλεχειριστήριο υπερύθρων πατιούνται.
Αυτή η μέθοδος μπορεί να ανιχνεύσει ανεξάρτητα και τα 4 κουμπιά πάνω/κάτω, αλλά δεν μπορεί να ανιχνεύσει το κουμπί φάρου.
Αυτή η μέθοδος λειτουργεί μόνο με το τηλεχειριστήριο στο κανάλι 1.
| Επιστρέφει: | Λίστα πατημένων κουμπιών στο τηλεχειριστήριο στο επιλεγμένο κανάλι. |
|---|---|
| Τύπος επιστροφής: | Λίστα κουμπιών |
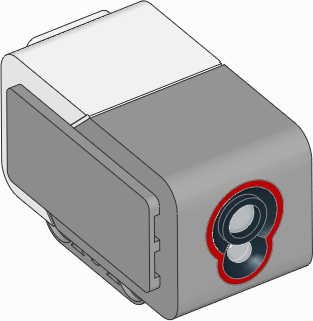
Αισθητήρας υπερήχων
.class UltrasonicSensor(port)
LEGO® MINDSTORMS® EV3 Αισθητήρας υπερήχων.
| Παραμέτρους: | port (Port) – Θύρα στην οποία είναι συνδεδεμένος ο αισθητήρας. |
|---|
distance(silent=False)
Μετρά την απόσταση μεταξύ του αισθητήρα και ενός αντικειμένου χρησιμοποιώντας υπερηχητικά ηχητικά κύματα.
| Παραμέτρους: | silent (δυαδικό) – Επιλέξτε True για να απενεργοποιήσετε τον αισθητήρα μετά την μέτρηση της απόστασης. Αυτό μειώνει τις παρεμβολές με άλλους αισθητήρες υπερήχων. Εάν το κάνετε αυτό πολύ συχνά, ο αισθητήρας μπορεί να παγώσει. Εάν συμβεί αυτό, αποσυνδέστε το και συνδέστε το ξανά. |
|---|---|
| Επιστρέφει: | Απόσταση. |
| Τύπος επιστροφής: | distance: mm |
Έλεγχοι για την παρουσία άλλων αισθητήρων υπερήχων με ανίχνευση υπερηχητικών ήχων.
Εάν ο άλλος αισθητήρας υπερήχων λειτουργεί σε αθόρυβη λειτουργία, μπορείτε να ανιχνεύστε μόνο την παρουσία αυτού του αισθητήρα ενώ παίρνει μία μέτρηση.
| Επιστρέφει: | True εάν ανιχνευθούν υπερηχητικοί ήχοι, False αν όχι. |
|---|---|
| Τύπος επιστροφής: | δυαδικό |
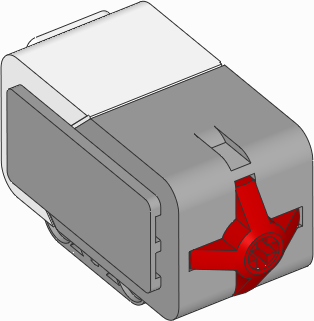
Γυροσκοπικός αισθητήρας
.classGyroSensor(port, positive_direction=Direction.CLOCKWISE)
LEGO® MINDSTORMS® EV3 Αισθητήρας γυροσκοπίου.
| Παράμετροι: | port (Port) – Θύρα στην οποία είναι συνδεδεμένος ο αισθητήρας. positive_direction (Direction) – Θετική κατεύθυνση περιστροφής όταν κοιτάζετε την κόκκινη κουκκίδα στην κορυφή του αισθητήρα. |
|---|
Παίρνει την ταχύτητα (γωνιακή ταχύτητα) του αισθητήρα.
| Επιστρέφει: | Γωνιακή ταχύτητα αισθητήρα. |
|---|---|
| Τύπος επιστροφής: | rotational speed: deg/s |
Παίρνει τη συσσωρευμένη γωνία του αισθητήρα.
| Επιστρέφει: | Γωνία περιστροφής. |
|---|---|
| Τύπος επιστροφής: | angle: deg |
Εάν χρησιμοποιείτε τη μέθοδο angle(), δεν μπορείτε να χρησιμοποιήσετε τη μέθοδο speed() στο ίδιο πρόγραμμα. Κάτι τέτοιο θα επαναφέρει το γωνία αισθητήρα στο μηδέν κάθε φορά που διαβάζετε την ταχύτητα.
Ρυθμίζει τη γωνία περιστροφής του αισθητήρα στην επιθυμητή τιμή.
| Παράμετρος: | angle (angle: deg) – Τιμή στην οποία πρέπει να γίνει επαναφορά της γωνίας. |
|---|