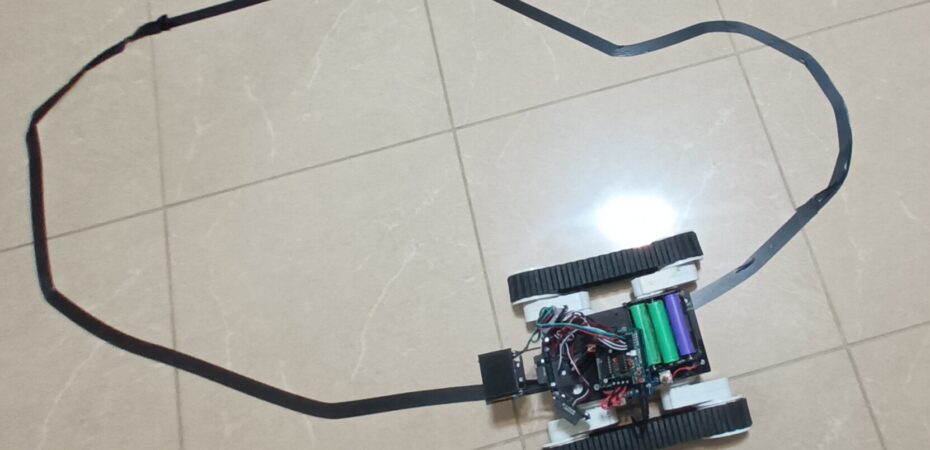
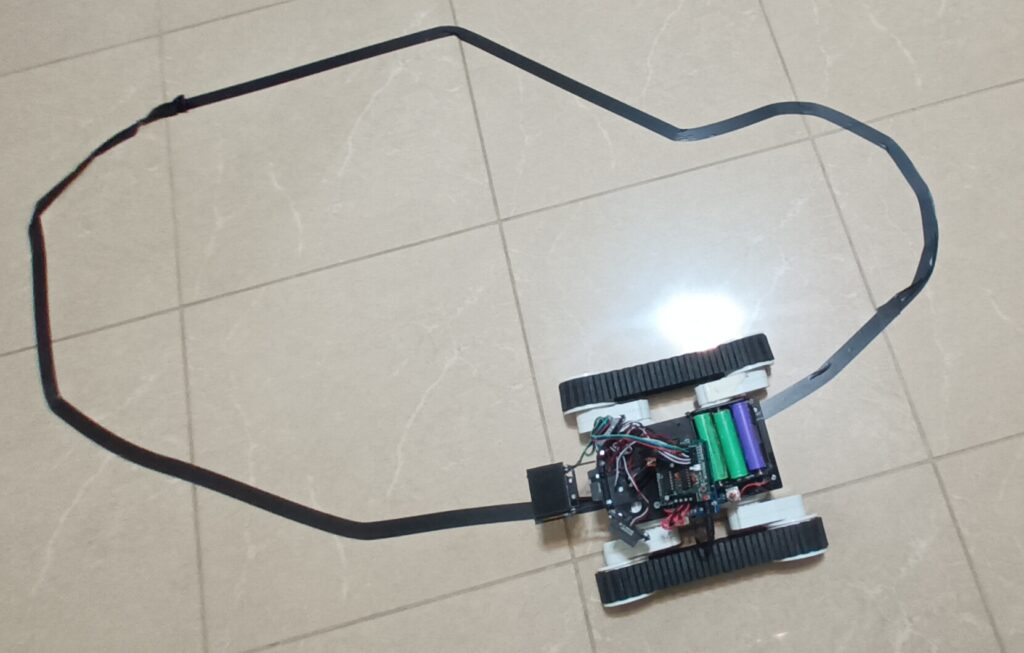
Σε αυτή τη δραστηριότητα θα συνδέσουμε το Huskylens με to arduino Uno και θα το προγραμματίσουμε να ακολουθεί μία μαύρη γραμμή.
Η Huskylens είναι μια κάμερα AI από την dfrobot.com . Έχει πολλά χαρακτηριστικά όπως αναγνώριση προσώπου, αναγνώριση αντικειμένων, παρακολούθηση αντικειμένων, αναγνώριση χρωμάτων, παρακολούθηση γραμμών. Μπορεί να εκπαιδευτεί μόνο με ένα κλικ στο κουμπί ή μερικές γραμμές κωδικών που υποστηρίζονται σε γλώσσα python, micropython και Arduino. Περισσότερα για το Huskylens.
Κατάλογος υλικών
- 1 Huskylens Σύνδεσμος
- 1 Arduino Uno
- 1 Πλακέτα οδήγησης κινητήρων. Εδώ χρησιμοποιήσαμε την Robot Shield for Arduino
- 2 Κινητήρες DC, Εδω χρησιμοποιήσαμε το κιτ τανκ rover5 , αλλά μπορεί να χρησιμοποιήσετε οποιοδήποτε άλλο.
Σημείωση: Πριν ξεκινήσετε, πρέπει να γνωρίζετε για το Arduino και το Arduino IDE καθώς πρόκειται να χρησιμοποιήσουμε για τον προγραμματισμό του Arduino. Δείτε άλλα άρθρα σε αυτό το ιστολόγιο.
Σύνδεση κυκλώματος
- Πραγματοποιήστε όλες τις συνδέσεις όπως φαίνεται στο διάγραμμα κυκλώματος.
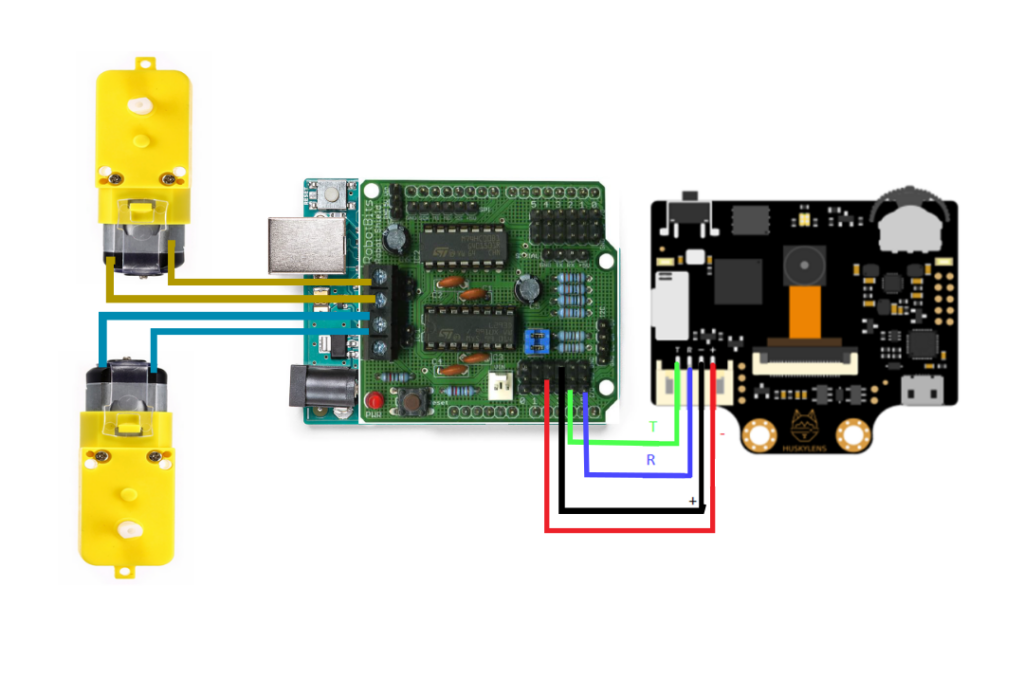
Ρυθμίστε στην κάμερα Huskylens το πρωτόκολλο σε I2C. Ακολουθήστε για λεπτομερείς οδηγίες: https://wiki.dfrobot.com/HUSKYLENS_V1.0_SKU_SEN0305_SEN0336.
Πιέστε δεξιά – αριστερά το αριστερό πλήκτρο και πιέστε το στην επιλογή “Line Tracking”, κατόπιν πατήστε το δεξιό πλήκτρο για να ξεκινήσετε την λειτουργία εκμάθησης γραμμής
Κώδικας
ΒΗΜΑ 1ο. Κατεβάστε την βιβλιοθήκη C Huskylens για το arduino
*Αντιγράψτε τον φακελο HUSKYLENS μεσα στο φάκελο Library (C:\Users\user_name\Documents\Arduino\libraries\) .
ΒΗΜΑ 2 Κωδικός αναγνώρισης γραμμής
*Αντιγράψτε τον παρακάτω κώδικα σε ένα νέο έγγραφο στο arduino IDE
/***************************************************
Created 2024-03-2
By [S. Anagnostakis](sanagn@uoc.gr)
This example shows the basic function of library for HUSKYLENS via I2c arduino on rover5 chasses.
***************************************************
GNU Lesser General Public License.
See <http://www.gnu.org/licenses/> for details.
All above must be included in any redistribution
****************************************************/
/***********Notice and Trouble shooting***************
1.Connection and Diagram can be found here
<https://robolab.edc.uoc.gr/#....>
2.This code is tested on Arduino Uno, boards.
****************************************************/
#include "HUSKYLENS.h"
//HUSKYLENS An Easy-to-use AI Machine Vision Sensor
//<https://www.dfrobot.com/product-1922.html>
// Motor A, Left Side
const uint8_t motor_left_pwm = 6;// ENA - Enable and PWM
const uint8_t motor_left_dir = 8;// 1Ainv2A - Forward / Reverse
// Motor B, Right Side
const uint8_t motor_right_pwm = 9;// ENA - Enable and PWM
const uint8_t motor_right_dir = 7;// 3Ainv4A - Forward / Reverse
int speed=80;
HUSKYLENS huskylens;
//HUSKYLENS green line >> SDA; blue line >> SCL
void printResult(HUSKYLENSResult result);
void setup() {
// Setup motors
pinMode(motor_left_pwm, OUTPUT);
pinMode(motor_left_dir, OUTPUT);
pinMode(motor_right_pwm, OUTPUT);
pinMode(motor_right_dir, OUTPUT);
Serial.begin(115200);
Wire.begin();
while (!huskylens.begin(Wire))
{
Serial.println(F("Begin failed!"));
Serial.println(F("1.Please recheck the \"Protocol Type\" in HUSKYLENS (General Settings>>Protocol Type>>I2C)"));
Serial.println(F("2.Please recheck the connection."));
delay(100);
}
}
void loop() {
int32_t Rten;
int32_t Rdir;
if (!huskylens.request()) Serial.println(F("Fail to request data from HUSKYLENS, recheck the connection!"));
else if(!huskylens.isLearned()) Serial.println(F("Nothing learned, press learn button on HUSKYLENS to learn one!"));
else if(!huskylens.available()) Serial.println(F("No block or arrow appears on the screen!"));
else {
Serial.println(F("###########"));
}
while (huskylens.available()) {
HUSKYLENSResult result = huskylens.read();
printResult(result);
Rten = (int32_t)result.xTarget - (int32_t)160; //160 είναι το μέσο Χ της κάμερας
Rdir = (int32_t)result.xTarget;
Serial.println(String()+"ένταση: "+Rten+", "+"κατέυθυνση: "+Rdir);
if (Rdir > 170){
//turn_right(100);
int xtl=speed-abs(Rten);
int xtr=speed+abs(Rten);
if (xtl <0) xtl = 00;
if (xtr > 200) xtr = 200;
move_tank(xtl, xtr);
//delay(abs(Rten));
//motor_stop();
}
else if (Rdir < 150){ //δεξιος τροχος
//turn_left(100);
int xtl=speed+abs(Rten);
int xtr=speed-abs(Rten);
if (xtl >200) xtl =200;
if (xtr < 0) xtr = 0;
move_tank(xtl, xtr);
//delay(abs(Rten));
//motor_stop();
}
else if((Rdir >149) && (Rdir <171)) {
drive_forward(speed);
//delay(20);
}
else {
motor_stop();
}
delay(10);
}
}
void printResult(HUSKYLENSResult result){
if (result.command == COMMAND_RETURN_BLOCK){
Serial.println(String()+F("Block:xCenter=")+result.xCenter+F(",yCenter=")+result.yCenter+F(",width=")+result.width+F(",height=")+result.height+F(",ID=")+result.ID);
}
else if (result.command == COMMAND_RETURN_ARROW){
Serial.println(String()+F("Arrow:xOrigin=")+result.xOrigin+F(",yOrigin=")+result.yOrigin+F(",xTarget=")+result.xTarget+F(",yTarget=")+result.yTarget+F(",ID=")+result.ID);
}
else{
Serial.println("Object unknown!");
}
}
void motor_stop(){
digitalWrite(motor_left_pwm, LOW);
digitalWrite(motor_right_pwm, LOW);
delay(25);
}
void drive_forward(int sf){
Serial.println(String()+"front= "+sf);
digitalWrite(motor_left_dir, HIGH);
analogWrite(motor_left_pwm, sf);
digitalWrite(motor_right_dir, HIGH);
analogWrite(motor_right_pwm, sf);
}
void drive_backward(int sb){
digitalWrite(motor_left_dir, HIGH);
analogWrite(motor_left_pwm, sb);
digitalWrite(motor_right_dir, HIGH);
analogWrite(motor_right_pwm, sb);
}
void turn_left(int sl){
Serial.println(String()+"left= "+sl);
digitalWrite(motor_left_dir, LOW);
analogWrite(motor_left_pwm, 0);
digitalWrite(motor_right_dir, LOW);
analogWrite(motor_right_pwm, sl);
}
void turn_right(int sr){
Serial.println(String()+"right= "+sr);
digitalWrite(motor_left_dir, LOW);
analogWrite(motor_left_pwm, sr);
digitalWrite(motor_right_dir, LOW);
analogWrite(motor_right_pwm, 0);
}
void move_tank(int sl, int sr){
Serial.println(String()+sl+" , "+sr);
digitalWrite(motor_left_dir, HIGH);
analogWrite(motor_left_pwm, sl);
digitalWrite(motor_right_dir, HIGH);
analogWrite(motor_right_pwm, sr);
}